CAN-Bus-Interface
CAN Bus driver for OpenLCB
Derived from RailroadShield.
|
CAN-Bus-Interface Version 1.0
First built: 2010.07
Note: Experimental design, work in progress
- 1.0 - Initial version
|
|
|
Download CAN-Bus-Interface.parts - Parts List (spreadsheet data)
CAN-Bus-Interface.bom
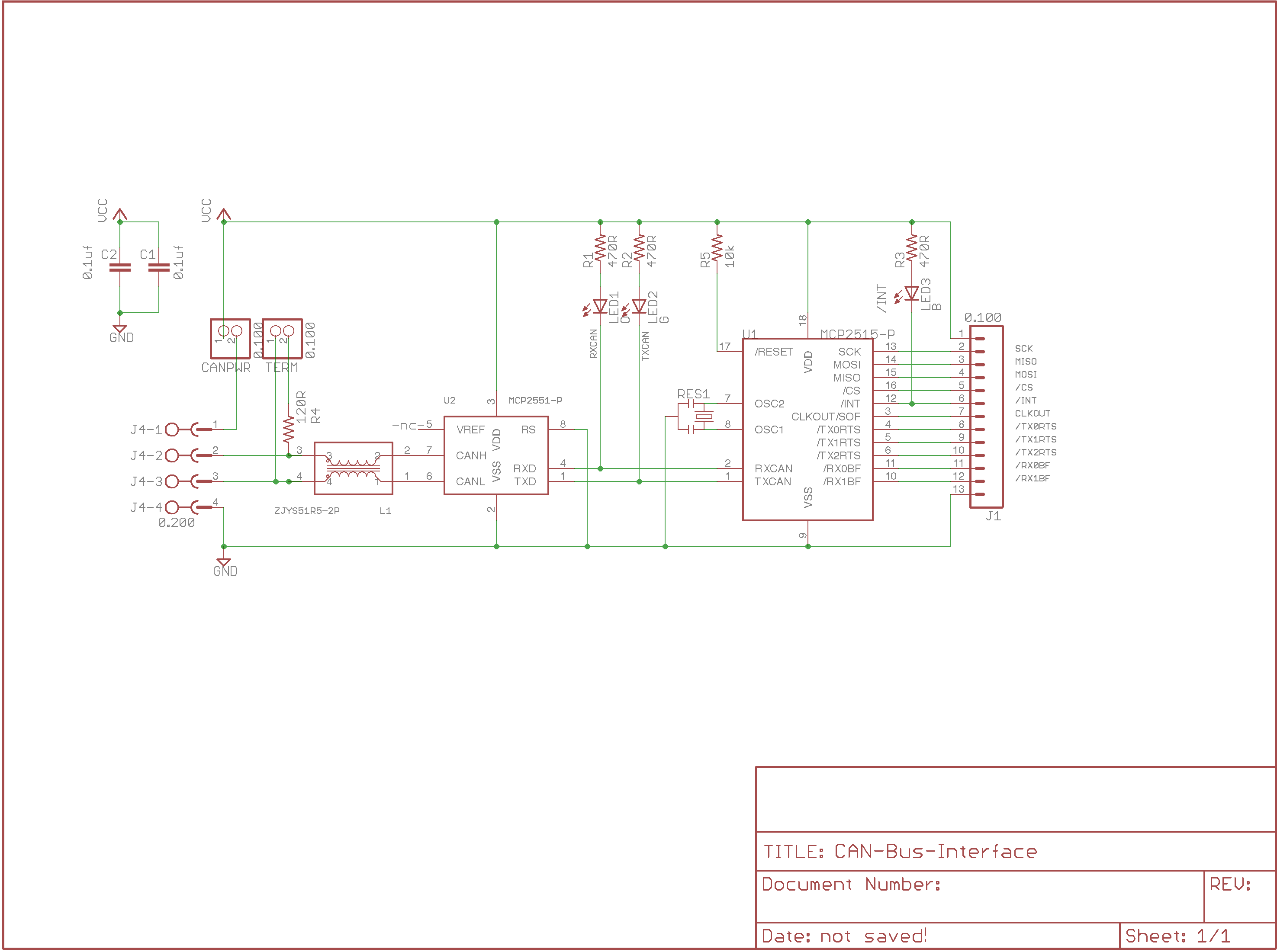
| Parts | Value | Package | Quantity | Library | Type/Feeder |
|---|---|---|---|---|---|
| C1, C2 | 0.1uf | CAP-PTH-SMALL2 | 2x | SparkFun | PTH |
| CANPWR, TERM | 0.100 | 1X02 | 2x | pinhead | PTH |
| J1 | 0.100 | 1X13 | 1x | SparkFun | PTH |
| J4 | 0.200 | MSTBV4 | 1x | con-phoenix-508 | PTH |
| R5 | 10k | 0204/5 | 1x | rcl | PTH |
| R4 | 120R | 0204/5 | 1x | rcl | PTH |
| R1, R2, R3 | 470R | 0204/5 | 3x | rcl | PTH |
| LED3 | B | Q62902-B155 | 1x | MCP | PTH |
| LED2 | G | Q62902-B155 | 1x | MCP | PTH |
| U1 | MCP2515-P | DIL18 | 1x | MCP | PTH |
| U2 | MCP2551-P | DIL08 | 1x | MCP | PTH |
| LED1 | O | Q62902-B155 | 1x | MCP | PTH |
| RES1 | RESONATORPTH | RESONATOR-PTH | 1x | SparkFun | PTH |
| L1 | ZJYS51R5-2P | ZJYS | 1x | MCP | NONE |
Documentation
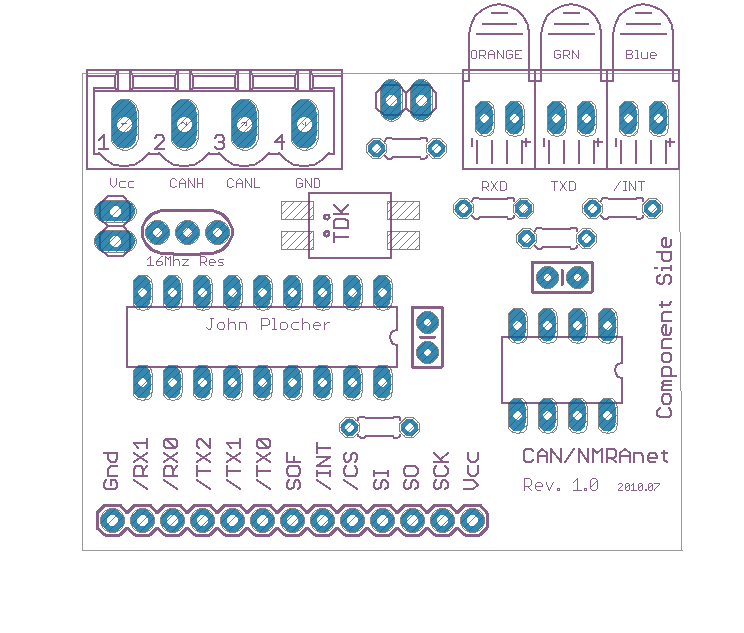
The CANBus Breadboard interface is a simple experimenter’s interface to the new, experimental CAN bus based NMRANet model railroad control bus. It is similar to, and derived from the LEDuino, which (at this writing) is no longer available.
CANBus Breadboard Interface features
- 5v power input taken from breadboard
- A complete hardware interface to the industry standard CAN Bus
- A single EuroStyle 4 pin commector (5v, H, L, Gnd)
- Optional LED “RX”, “TX”, and “Interrupt” feedback
- All MCP2551 communication pins available for connection to appropriate processor input and output pins.
This technical documentation is licensed under the CERN Open Hardware Licence v1.2