PCRdemo2015
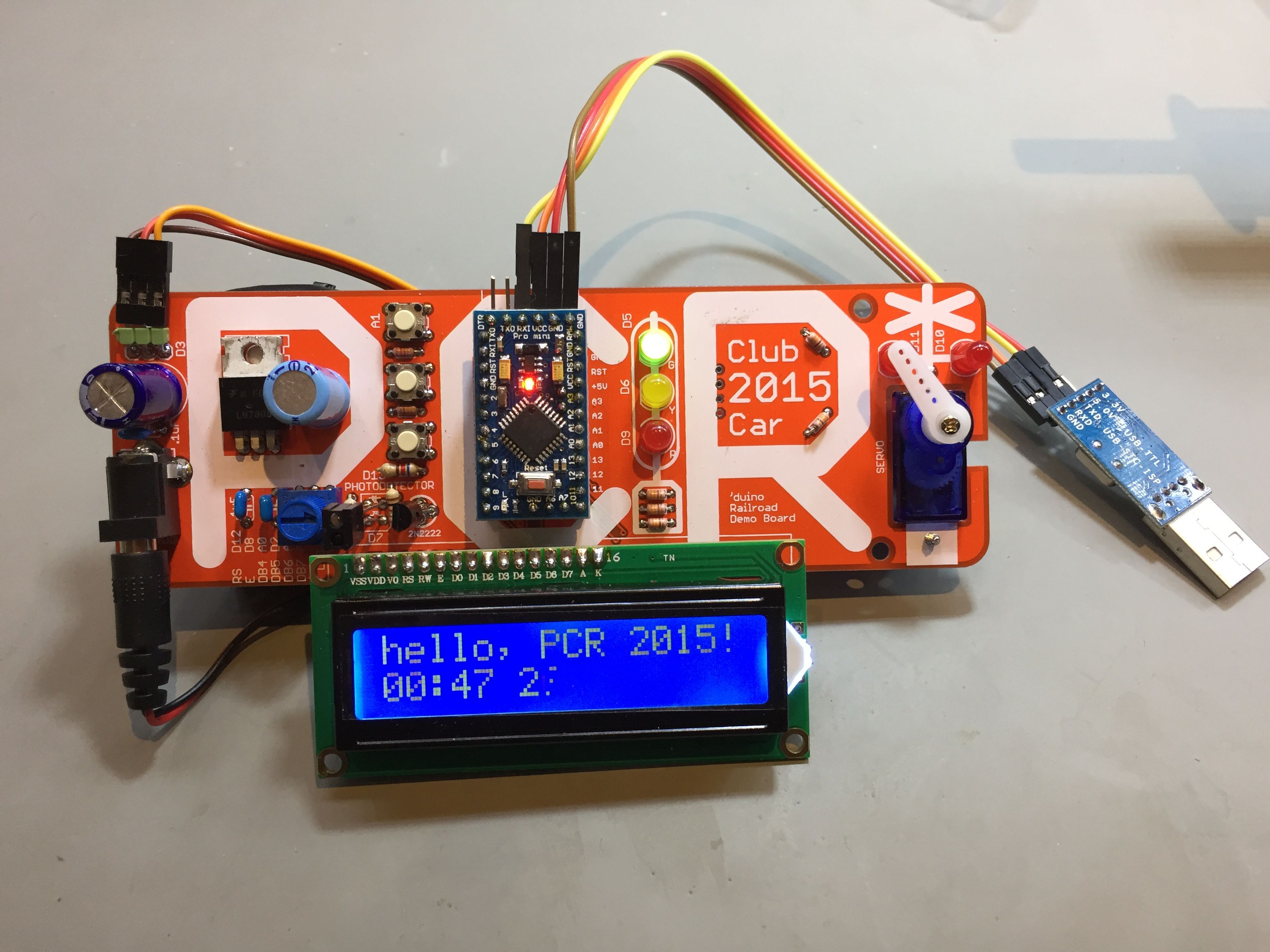
Demo code for PRC1025 demo board
|
Download PCRdemo2015.ino - Arduino Sketch
PCRdemo2015
/*
* Demo code for PRC1025 demo board
*
* Includes LEDs (R/R for Xing, RYG for a signal), pushbuttons,
* a servo and an LCD.
*
* The demo uses the buttons to raise and lower the crossing gate and
* turn on/off the blinking crossing lights.
*
* The demo also runs timed activities "in the background", so that the
* signal changes aspects and the crossing automatically triggers every
* once in a while.
*
* The board also includes provisions for an IR sensor - unfortunately,
* the circuit was miswired to a digital pin instead of an analog one, so
* it doesn't (and can't) work without board trace rerouting. Oops.
*/
#include <LiquidCrystal.h>
#include <elapsedMillis.h>
#include <Servo.h>
#define MOD1
/*
* The circuit:
* LCD
* D8 Enable pin
* nc D0 pin
* nc D1 pin
* nc D2 pin
* nc D3 pin
* A0 D4 pin
* D2 D5 pin
* A2 D6 pin
* A3 D7 pin
* GND R/W pin
* GND VSS pin
* +5v VCC pin
* 10K resistor:
* ends to +5V and ground
* wiper to LCD VO pin (pin 3)
*
* A1 Voltage divider ladder with momentary pushbuttons
* (Voltage at pin determines which button was pressed, if any)
*
* "signal head" - D5 PWM green
* - D6 PWM yellow
* - D9 PWM red
* "crossbucks" - D10 PWM red LEDs
* - D11 PWM red LEDs
*
* Pin assignments:
* ================
* D0 TTL/USB serial RX
* D1 TTL/USB serial TX
* D2 LCD high nibble data5
* D3 PWM Servo
* D4 unused
* D5 "signal head" - PWM green
* D6 - PWM yellow
* D7 unused
* D8 LCD "E"nable
* D9 - PWM red
* D10 "crossbucks" - PWM red LEDs
* D11 "crossbucks" - PWM red LEDs
* D12 unused
* D13 unused (onboard LED...)
*
* A0 LCD high nibble data4
* A1 pushbuttons
* A2 LCD high nibble data6
* A3 LCD high nibble data7
* A4 I2C SDA
* A5 I2C SCL
* A6 unused - analog input only (no output capability)
* A7 unused - analog input only (no output capability)
*/
// pushbuttons...
#define PBUTTONS 1 // A1
// "crossbucks" - red LEDs
#define REDX1 10
#define REDX2 11
// "signal head"
#define RSIG 9
#define YSIG 6
#define GSIG 5
// Finally, the servo control pin
#define SERVO 3
// -----------------------------------------
// change these to match what you want
// -----------------------------------------
#define GATE_UP 95
#define GATE_DOWN 150
#define GREETING "Hello, Larry"
#define SECONDS (unsigned long)1000
#define MINUTES (unsigned long)(60 * SECONDS)
#define CROSSING_FREQUENCY ((unsigned long)( 5 * MINUTES))
#define CROSSING_PREFLASH ((unsigned long)( 4 * SECONDS))
#define CROSSING_GATEDOWN ((unsigned long)(10 * SECONDS))
#define CROSSING_POSTFLASH ((unsigned long)( 3 * SECONDS))
// -----------------------------------------
#ifdef MOD1 // John's modified prototype board
LiquidCrystal lcd(12, 8, 7, 2, A2, A3);
#else
LiquidCrystal lcd(12, 8, A0, 2, A2, A3);
#endif
Servo myservo; // create servo object to control a servo
// elapsedMillis variables are "magic C++" - they actually reflect the elapsed
// time since they were last time they were set. The design pattern is to set
// them to 0 when you want to start a timed activity, and then check to see if
// it reaches the desired timeout value...
elapsedMillis clockAnimationTime,
flashertime,
blinktime,
signalAnimationTime,
crossingAnimationTime;
boolean isXingOn, xingblinker = 0, sigblinker=0;
int sigstate = 0;
int crossingstate = 0;
int lastButton;
#define OFF 0x0FF
#define ON 0x000
#define BLINK 0x1FF
// global variables that hold the current values of the various LEDs
int r, g, y, x1, x2;
// and if fading is used, the target vvalues as well...
int target_r, target_g, target_y, target_x1, target_x2;
// Read resitive voltage divider to determine which button was pressed
// input: analog pin to read
// output: button pressed, if any:
#define BUTTON_3 2
#define BUTTON_2 1
#define BUTTON_1 0
#define BUTTON_NONE -1
int getButton(int p) {
int ButtonVoltage = analogRead(p);
// Observed analogRead() returned values:
// NONE: 1023
// B3: 310
// B2: 131
// B1: 0
// logic below is liberal in setting boundries between buttons to account for resistor tolerances
if (ButtonVoltage > 500) return BUTTON_NONE; // No button pressed should be 1023
if (ButtonVoltage > 250) return BUTTON_3;
if (ButtonVoltage > 100) return BUTTON_2;
return BUTTON_1;
}
int setLED(int p, int target, int current) {
int desired = target & 0x0FF;
if (desired == current) {
return desired;
} else {
int newvalue = desired;
if (p < 9 || p > 11) { // showing off fade -vs- no fade - don't fade the RED LEDs
if (desired > current) { newvalue = min(current + 1, desired); }
if (desired < current) { newvalue = max(current - 1, desired); }
}
analogWrite(p, newvalue);
return newvalue;
}
}
void setup() {
// setup code, run once:
pinMode(SERVO, OUTPUT); // servo
pinMode(GSIG, OUTPUT); // G LED
pinMode(YSIG, OUTPUT); // Y LED
pinMode(RSIG, OUTPUT); // R LED
pinMode(REDX1, OUTPUT); // L Xing R LED
pinMode(REDX2, OUTPUT); // R Xing R LED
pinMode(PBUTTONS, INPUT); // pushbuttons
pinMode(4, OUTPUT); // pushbuttons
myservo.attach(SERVO);
myservo.write(GATE_UP);
lcd.begin(16, 2);
lcd.print(GREETING);
lcd.setCursor(0, 1);
lcd.print("PCR '15");
signalAnimationTime = (10 * SECONDS);
isXingOn = false;
r = y = g = x1 = x2 = ON;
target_r = target_y = target_g = target_x1 = target_x2 = OFF;
x1 = setLED(REDX1, target_x1, x1);
x2 = setLED(REDX2, target_x2, x2);
r = setLED(RSIG, target_r, r);
y = setLED(YSIG, target_y, y);
g = setLED(GSIG, target_g, g);
lastButton = BUTTON_NONE;
}
void loop() {
// any buttons pressed?
int button1 = getButton(PBUTTONS);
delay(1); // debounce (if values differ, we are in the middle of a press
// or release, and will ignore the buttons this pass)
int button2 = getButton(PBUTTONS);
if ((button1 == button2) && (button1 != lastButton)) {
// solid button press, first time seen...
// choose what to do
switch (button1) {
case BUTTON_1:
myservo.write(GATE_UP);
break;
case BUTTON_2:
isXingOn = !isXingOn; // turn crossing on & off...
if (isXingOn) {
target_x1 = BLINK;
target_x2 = BLINK;
} else {
target_x1 = OFF;
target_x2 = OFF;
}
flashertime = 0;
break;
case BUTTON_3:
myservo.write(GATE_DOWN);
break;
default:
case BUTTON_NONE:
// do nothing
break;
}
// remember the last button pressed to prevent multiple invocations
// (stuttering, repeat...) of a single press
lastButton = button1;
}
// have the signals blink at a slightly different rate than the crossing flashers,
// just to show that it can be done.
if (flashertime > 800) {
flashertime = 0;
xingblinker = ! xingblinker;
}
if (blinktime > 750) {
blinktime = 0;
sigblinker = ! sigblinker;
}
// Each animation we're controlling has its own timer that we can check to
// see if it is time to do work... for example, we can display a crude
// clock on the LCD by incrementing a counter every second:
if (clockAnimationTime > (1 * SECONDS)) { // trigger every second...
unsigned long h, m, s;
clockAnimationTime = 0;
// set the cursor to LCD column 8, line 1
// (note: line 1 is the second row, since counting begins with 0):
lcd.setCursor(8, 1);
// print the time since reset:
// simple formatting to simulate hours, minutes and seconds
s = millis() / SECONDS;
h = (s / (60*60)) % 24;
m = (s / (60)) % 60;
s = s % 60;
lcd.print(h >= 10 ? "" : " " );lcd.print(h, DEC); lcd.print(':');
lcd.print(m >= 10 ? "" : "0" );lcd.print(m, DEC); lcd.print(':');
lcd.print(s >= 10 ? "" : "0" );lcd.print(s, DEC);
}
switch (crossingstate) {
case 0: // waiting to trigger...
if (crossingAnimationTime > CROSSING_FREQUENCY) { // pretend
crossingAnimationTime = 0; // train is
crossingstate = 1; // coming...
isXingOn = true; // start flashing
target_x1 = BLINK;
target_x2 = BLINK;
}
break;
case 1: // gates down
if (crossingAnimationTime > CROSSING_PREFLASH) {
crossingAnimationTime = 0;
crossingstate = 2;
myservo.write(GATE_DOWN);
}
break;
case 2: // gates back up
if (crossingAnimationTime > CROSSING_GATEDOWN) {
crossingAnimationTime = 0;
crossingstate = 3;
myservo.write(GATE_UP);
}
break;
case 3: // done flashing, go back to waiting...
if (crossingAnimationTime > CROSSING_POSTFLASH) {
crossingAnimationTime = 0;
isXingOn = false;
target_x1 = OFF;
target_x2 = OFF;
crossingstate = 0;
}
break;
}
if (signalAnimationTime > (10 * SECONDS)) { // walk thru the signal aspects
signalAnimationTime = 0;
switch (sigstate) {
case 0: target_r=BLINK; target_y=BLINK; target_g=BLINK; sigstate = 1; break; // TEST mode - flash all LEDs
case 1: target_r=ON; target_y=OFF; target_g=OFF; sigstate = 2; break; // STOP
case 2: target_r=BLINK; target_y=OFF; target_g=OFF; sigstate = 3; break; // RESTRICTING
case 3: target_r=OFF; target_y=ON; target_g=OFF; sigstate = 4; break; // APPROACH
case 4: target_r=OFF; target_y=BLINK; target_g=OFF; sigstate = 5; break; // ADVANCE APPROACH
case 5: target_r=OFF; target_y=OFF; target_g=ON; sigstate = 1; break; // CLEAR
}
}
// actually control the LEDs
x1 = setLED(REDX1,target_x1 == BLINK ? (xingblinker ? ON : OFF) : target_x1, x1);
x2 = setLED(REDX2,target_x2 == BLINK ? (xingblinker ? OFF: ON) : target_x2, x2);
r = setLED(RSIG, target_r == BLINK ? (sigblinker ? ON : OFF) : target_r, r);
y = setLED(YSIG, target_y == BLINK ? (sigblinker ? ON : OFF) : target_y, y);
g = setLED(GSIG, target_g == BLINK ? (sigblinker ? ON : OFF) : target_g, g);
}
This sketch is licensed under the MIT License