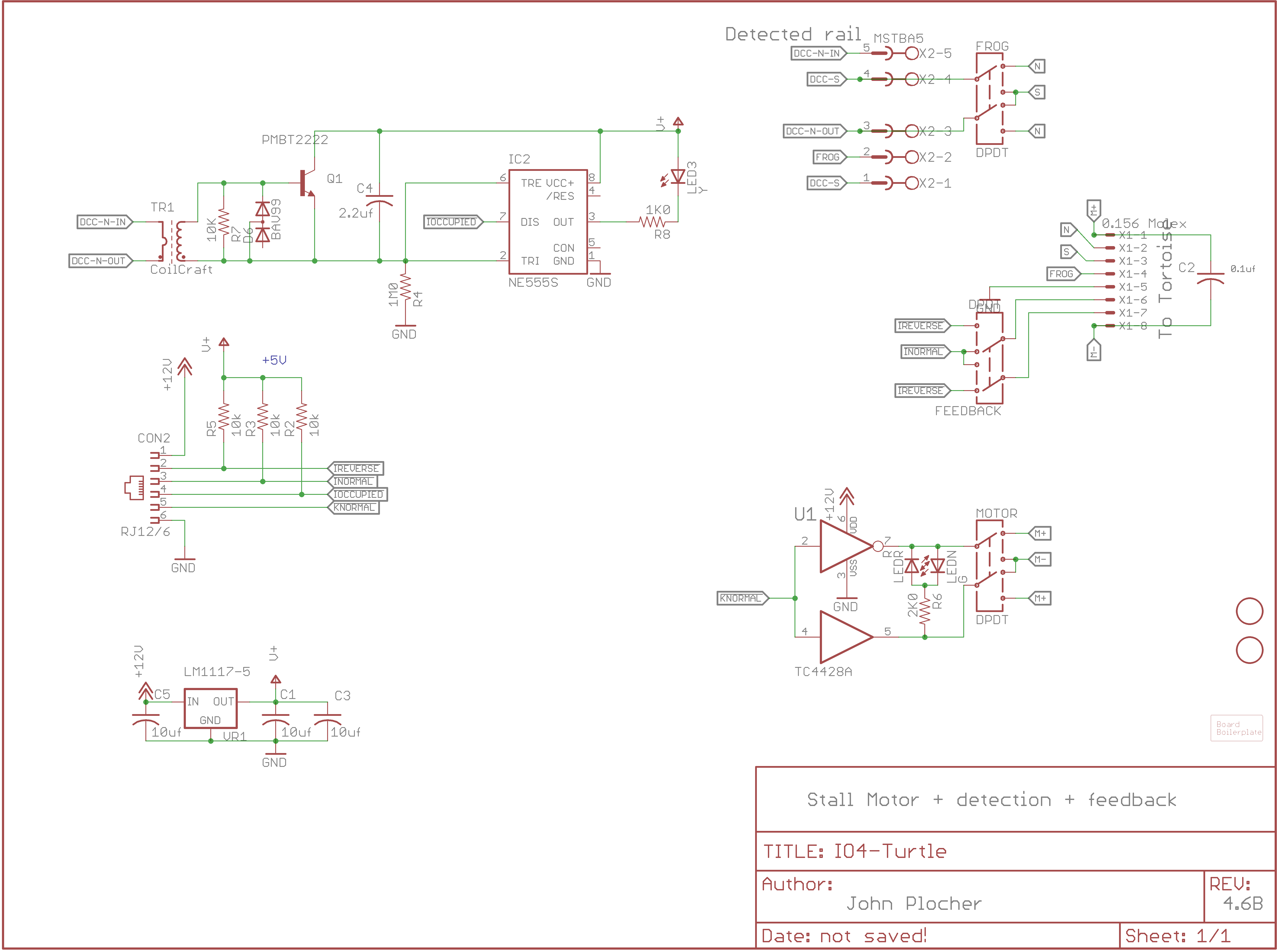
IO4-Turtle
IO4 Tortoise driver with occupancy and point position feedback
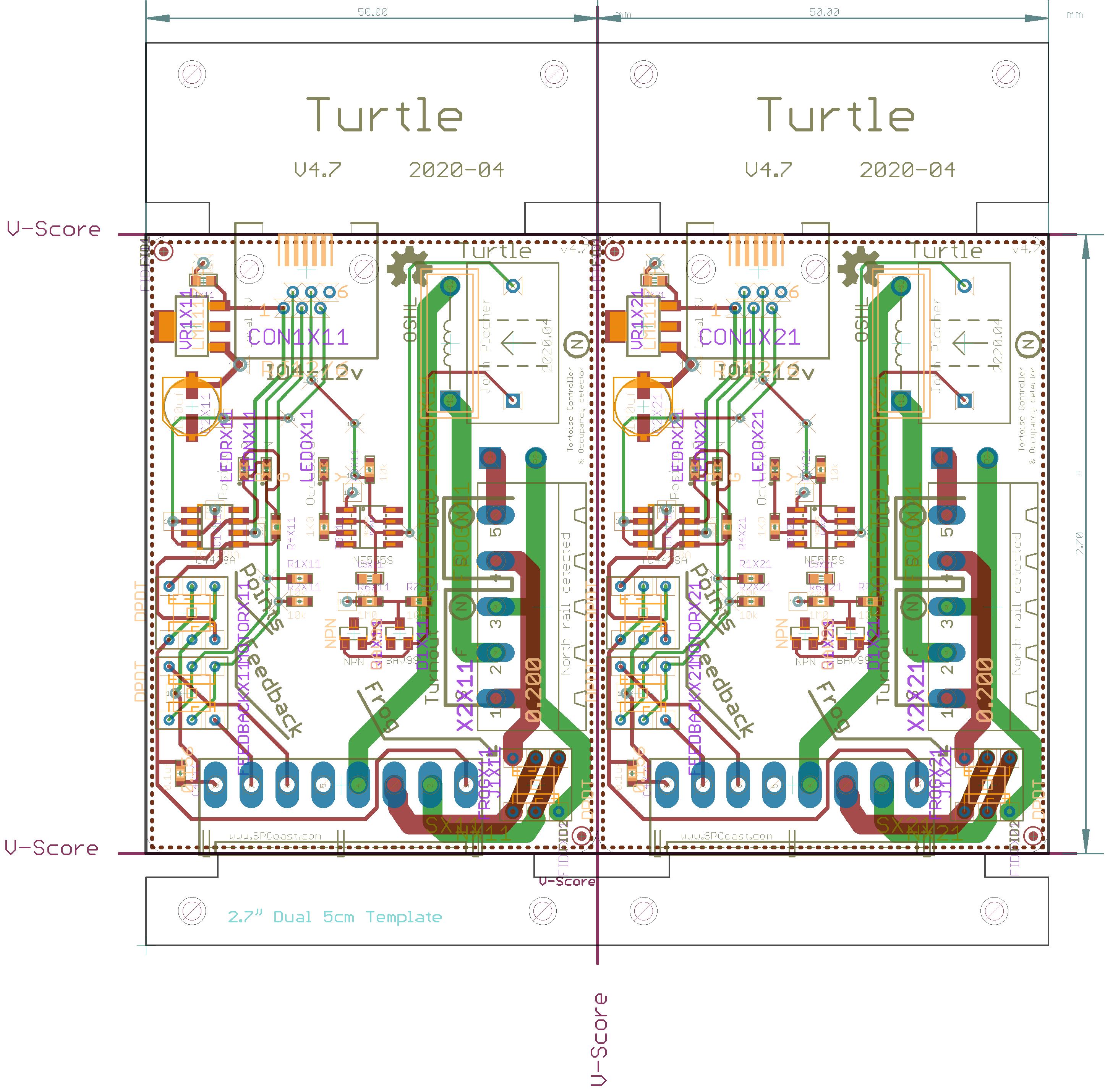
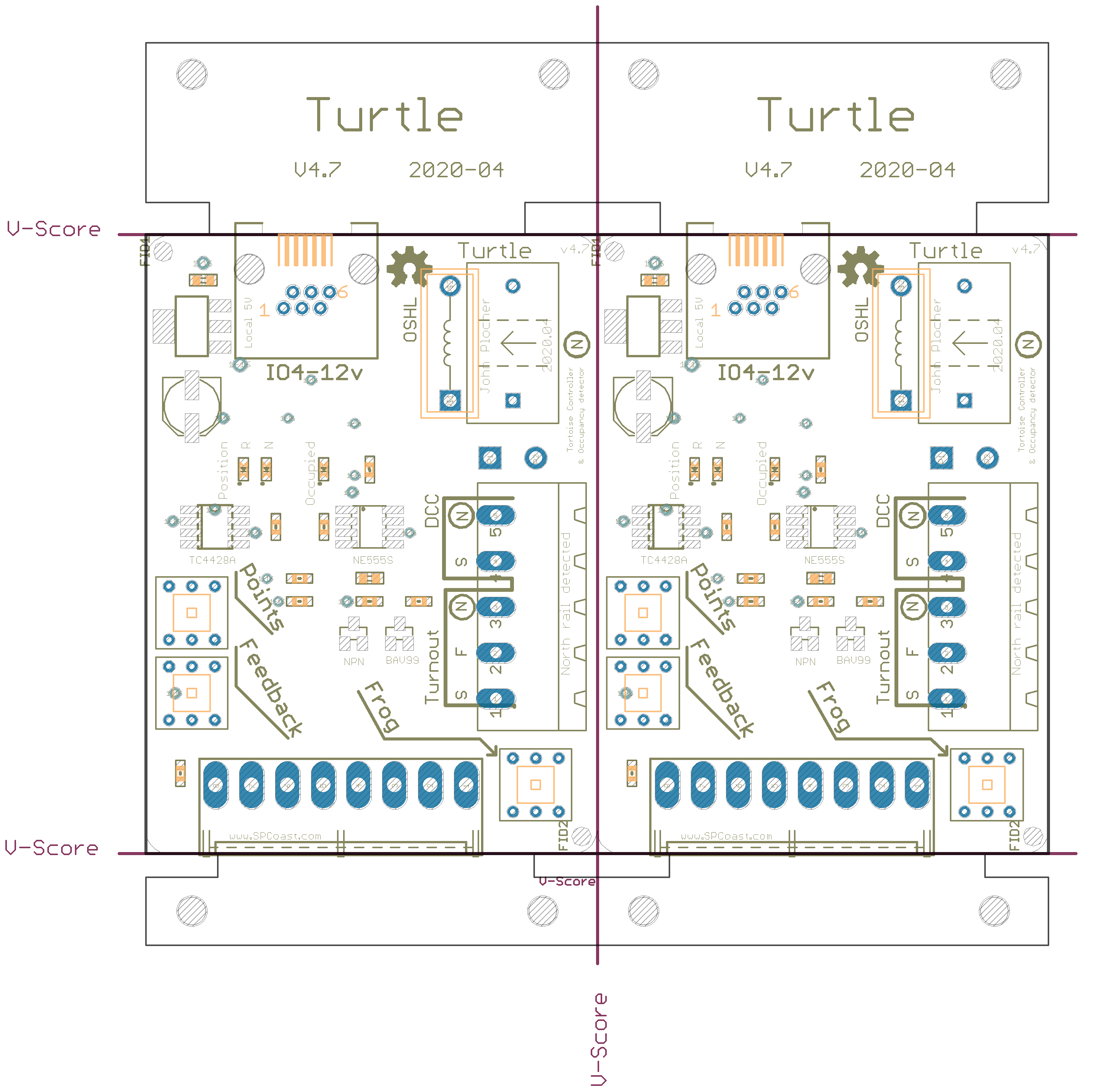
Carrier board, DFM, feedback LEDS that don’t pass tortoise current and IO4 Tortoise driver with occupancy and point position feedback
|
|
|

|
Download IO4-Turtle_array.scr - Eagle SCRipt
Download Untitled 2 -
Download lm1117-Datasheet.pdf - Documentation
IO4-Turtle Version 4.7
First built: 2018-03
Carrier board, DFM, feedback LEDS that don’t pass tortoise current and IO4 Tortoise driver with occupancy and point position feedback
|
|
|
|||
|
|
|
UNPUBLISHED
IO4-Turtle Version 4.6B
First built: 2018-03
Carrier board, DFM, feedback LEDS that don’t pass tortoise current and IO4 Tortoise driver with occupancy and point position feedback
|
|
|

UNPUBLISHED
Documentation
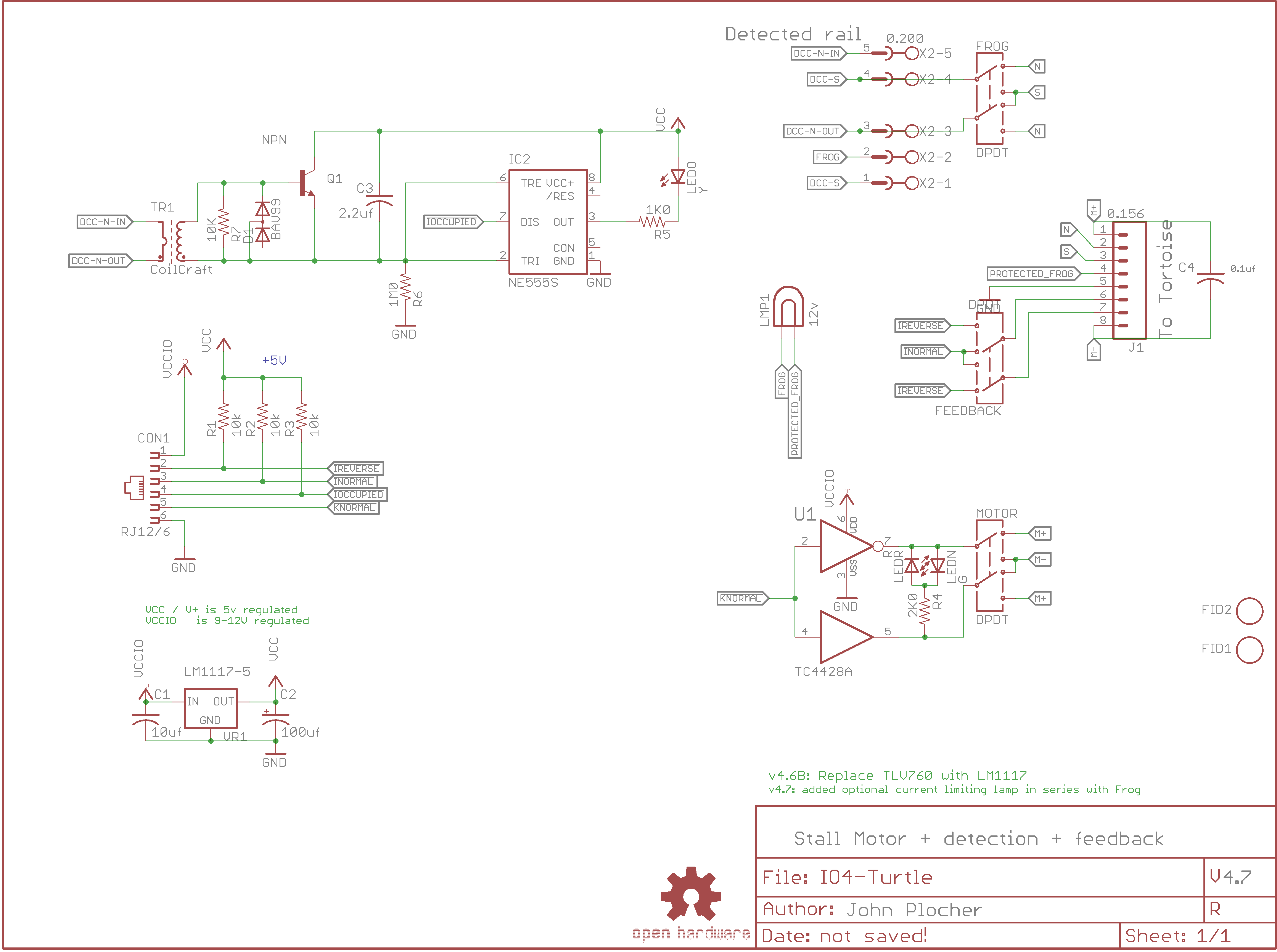
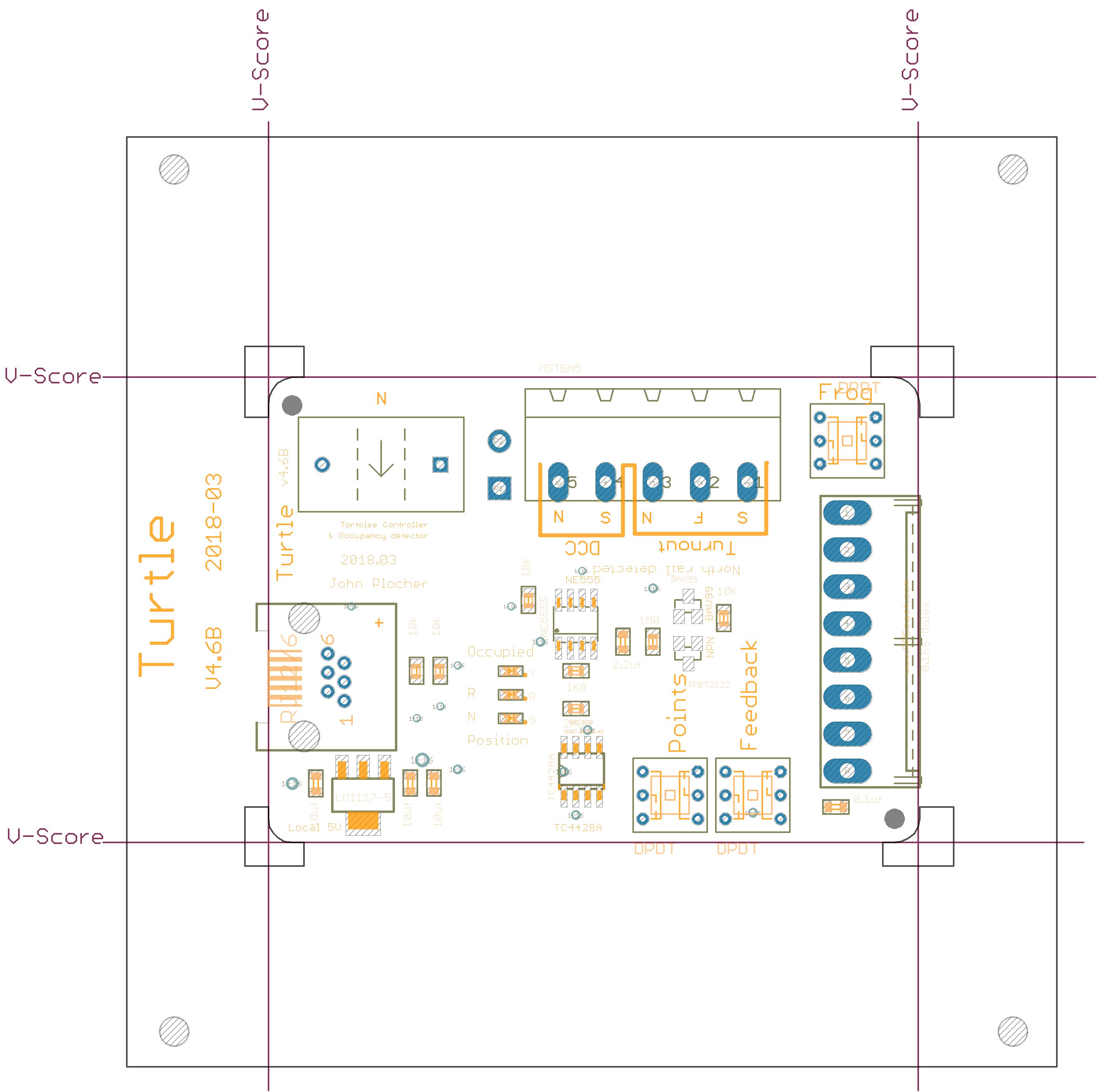
This is an adaptation of my older PIC-based ExpressPCB Turtle project, which is why the version numbers start at 4…. It has evolved quite a bit, in form factor and functionality as it has been used on my layout.
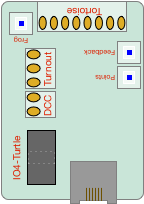
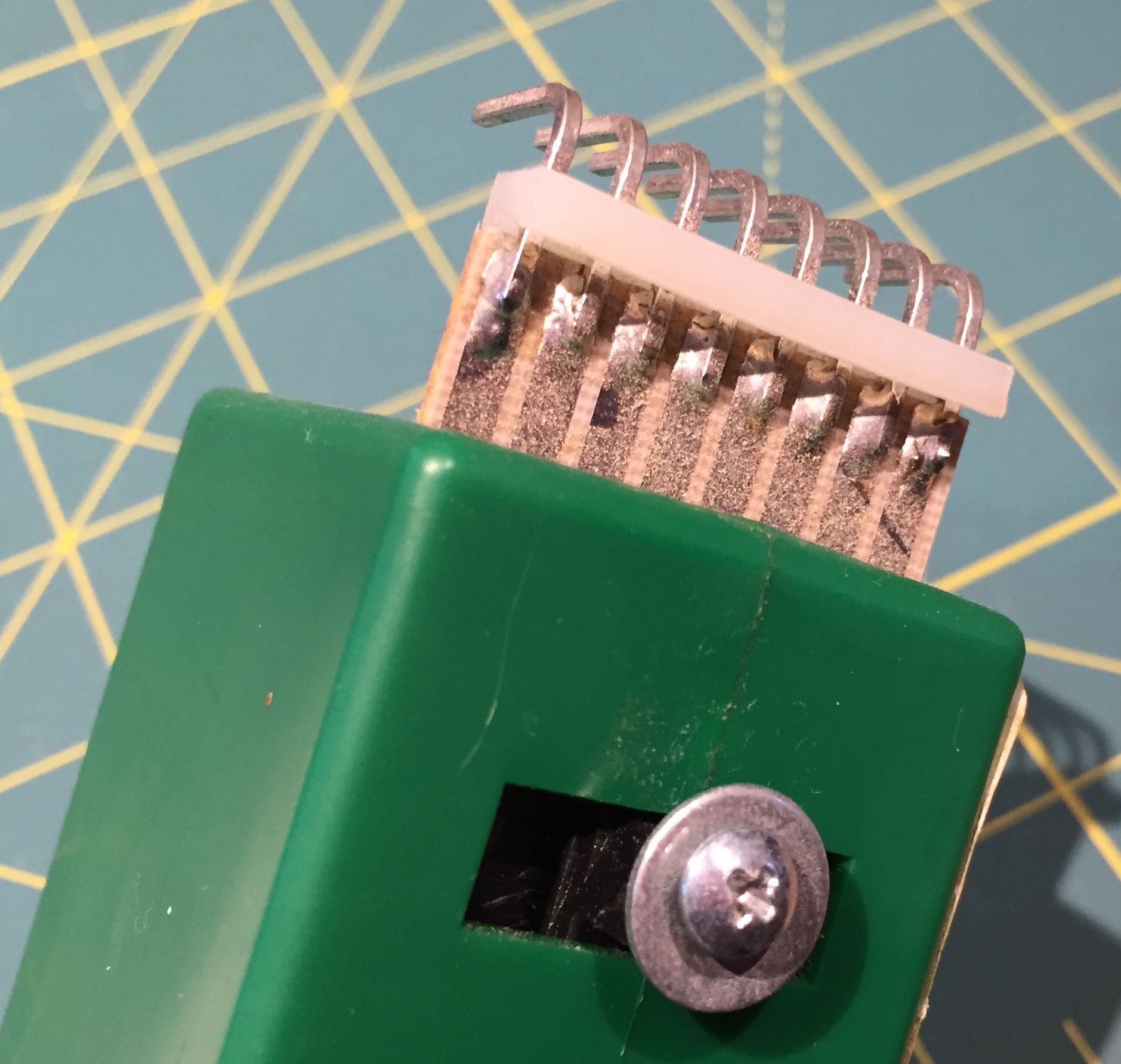
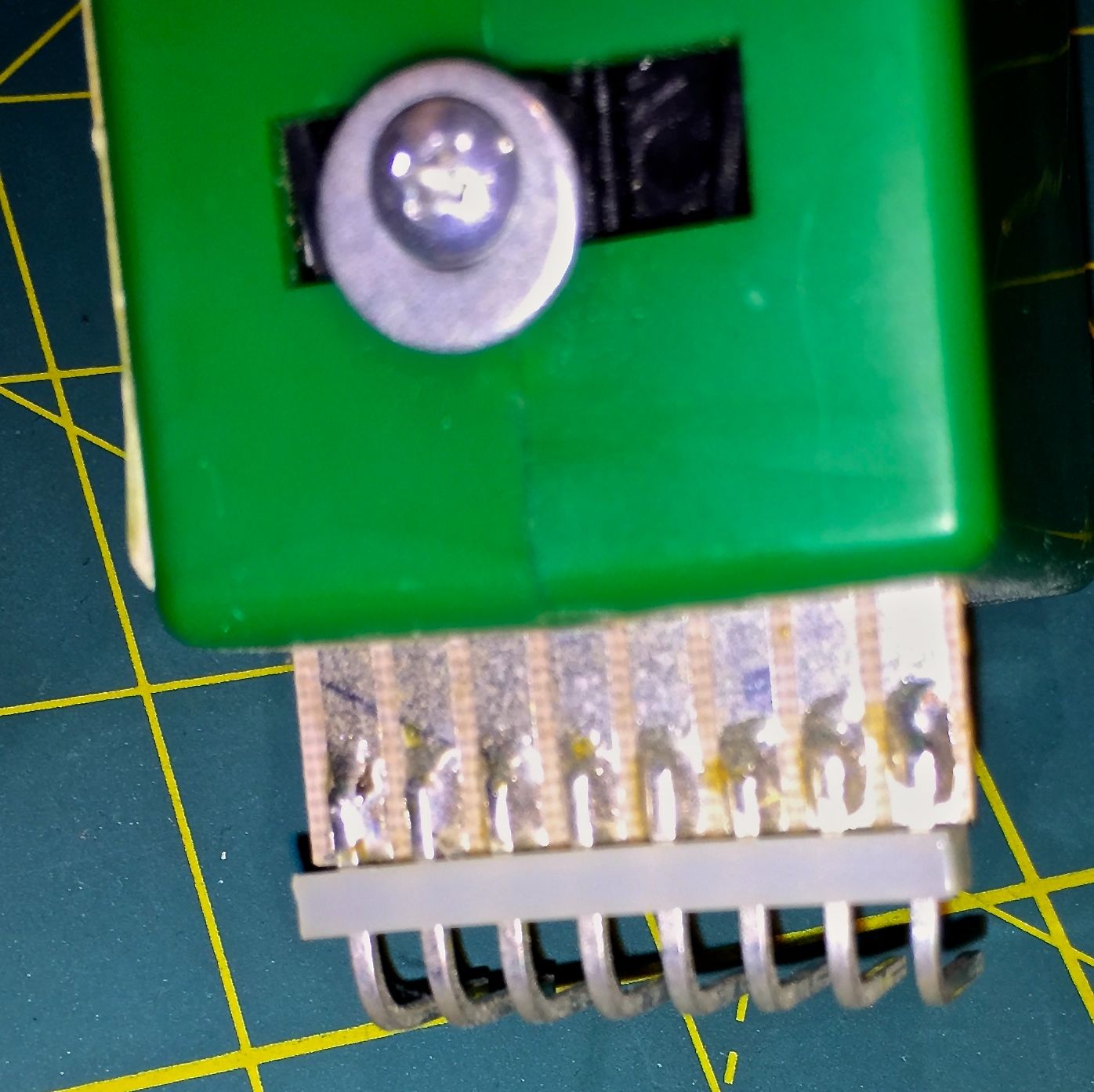
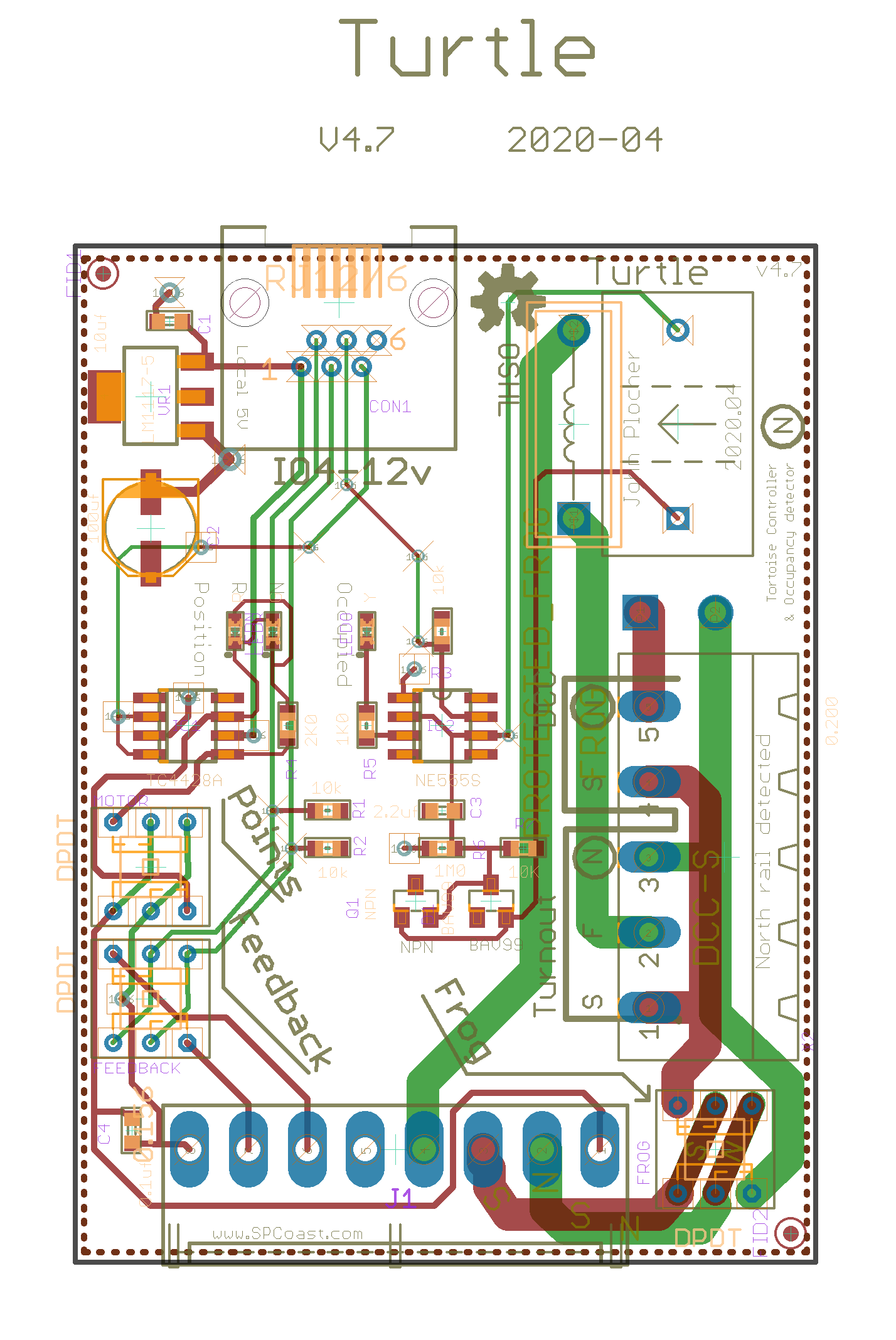
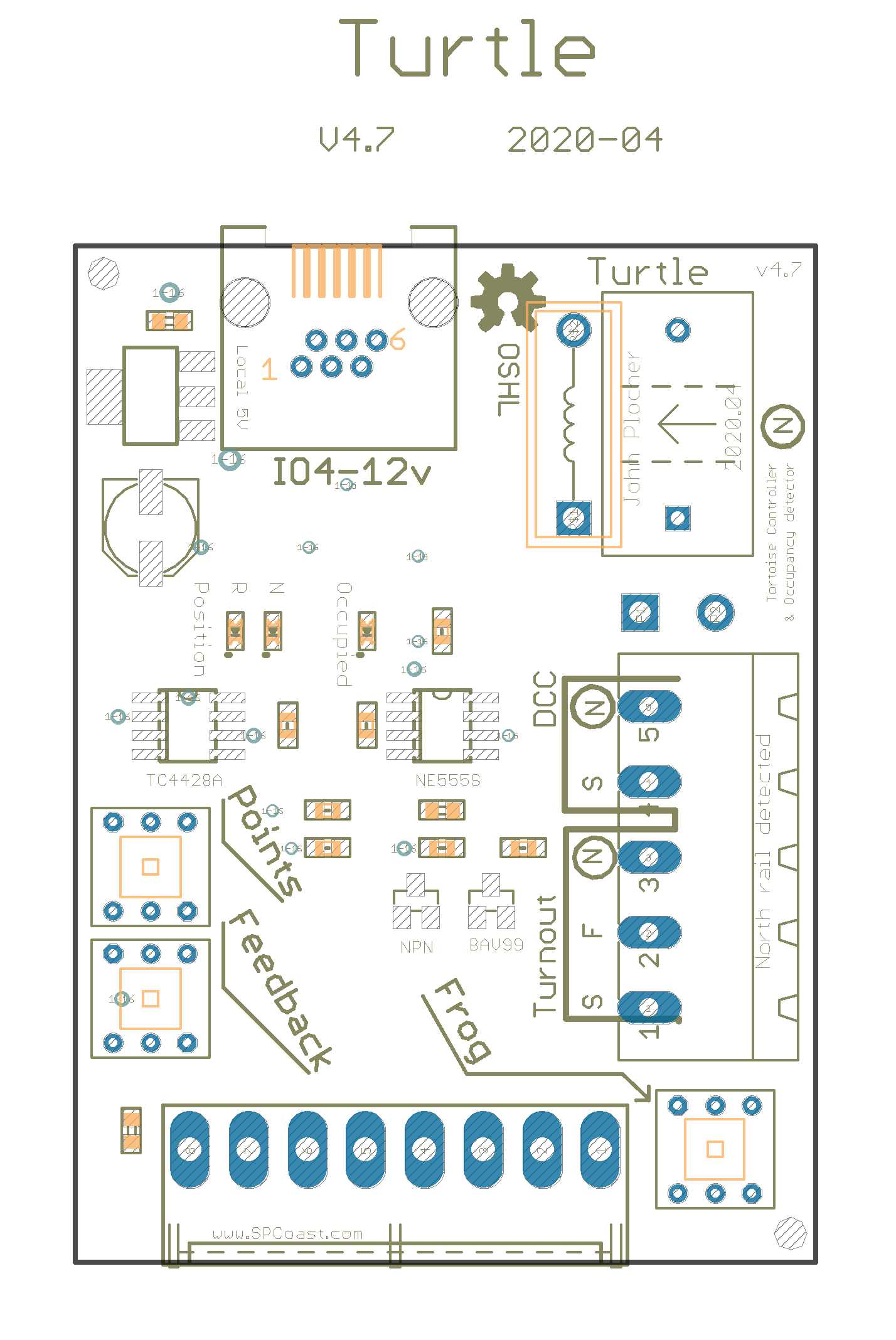
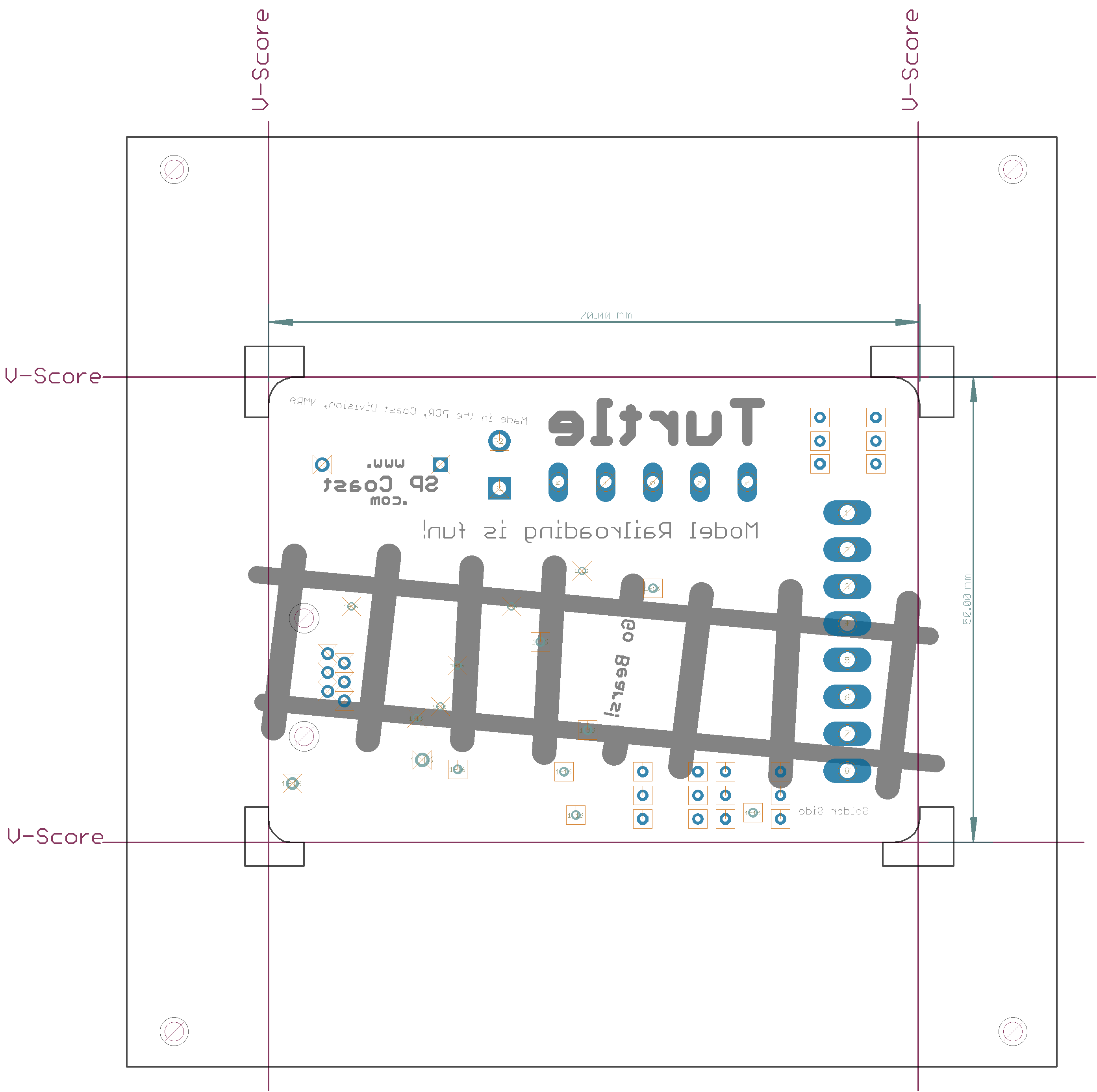
This board mounts on a Tortoise via a sweat-soldered right angle Molex M-M connector, plugs into an IOB-Turtle or other IO4 compatible port.
The Tortoise provides:
- OS section occupancy (so you don’t throw a turnout out from under a train…),
- Turnout point position feedback (Normal, in transit, Diverging)
- easy frog polarity changes for dealing with wiring mishaps
- easy Normal/Reverse changes for when the Normal route thru a turnout needs to go the other way.
- Tortoise motor debouncing when it reaches the end of travel
- feedback LEDs to show Occupancy (yellow) and commanded position (red/green)
It uses my standard IO4 RJ12/6 wiring interface:
- pin 1: 9-12vDC
- pin 2: !DIVERGING - Turnout Position Feedback - low = Diverging, high = not diverging
- pin 3: !NORMAL - Turnout Position Feedback - low = Normal, high = not normal
- pin 4: !OCCUPIED - Detector Feedback - low = occupied, high = empty
- pin 5: !MOTOR - Motor Control Input - Low = Normal, High = Diverging
- pin 6: GND
It also connects to the local DCC track power feed and to the turnout’s isolated-for-detection-purposes stock and frog rails.
This technical documentation is licensed under the CERN Open Hardware Licence v1.2